使用Wolfram Mathematica 完成 下列網站的機器運動學。
https://www.learnaboutrobots.com/forwardKinematics.htm
程式碼分享如下
COS[n_, \[Theta]_] := \!\(
\*UnderoverscriptBox[\(\[Sum]\), \(i = 1\), \(n\)]\(Cos[i*\[Theta]]\)\)
SIN[n_, \[Theta]_] := \!\(
\*UnderoverscriptBox[\(\[Sum]\), \(i = 1\), \(n\)]\(Sin[i*\[Theta]]\)\)
line[n_, \[Theta]_] :=
N@Table[{ColorData[100, "ColorList"][[i]],
Line[{{COS[i - 1, \[Theta]],
SIN[i - 1, \[Theta]]}, {COS[i, \[Theta]],
SIN[i, \[Theta]]}}]}, {i, 1, n}]
Manipulate[
Graphics[{Thickness[0.04], line[n, \[Theta]]},
PlotRange -> {{-3, 10}, {-1, 5}}], {{\[Theta], 0.5}, 0,
1}, {{n, 4},
3, 10, 1}, ControlPlacement -> Top]
另一個作法是用 Wolfram 本身的函數RotationTransform 來完成.
Manipulate[
r = RotationTransform[\[Theta]];
g = RotationTransform[\[Phi] + \[Theta]];
h = RotationTransform[\[Phi] + \[Theta] + \[Tau]];
mp = r[{1, 0}];
vp = mp + g[{1, 0}];
hp = vp + h[{1, 0}];
Graphics[{Point[5 {{-1, -1}, {1, 1}}],
Line[{{0, 0}, mp, vp, hp}]}], {\[Theta], 0, 4 \[Pi]}, {\[Phi], 0,
4 \[Pi]}, {\[Tau], 0, 4 \[Pi]}]再進一版,地球上最短的CODE
ClearAll["Global`*"];
n = 9;
ram = 0; rr =
Table[Subscript[l, i] = {2, 0}; ram += Subscript[\[Theta], i];
Subscript[p, i] = RotationTransform[ram][Subscript[l, i]], {i, n}];
exp = Graphics@List@Line@FoldList[Plus[#1, #2] &, {0, 0}, rr];
ii = Prepend[
Table[{Subscript[\[Theta], i], 0, (2 \[Pi])/(2 n)}, {i, n, 1, -1}],
exp];
Manipulate @@ ii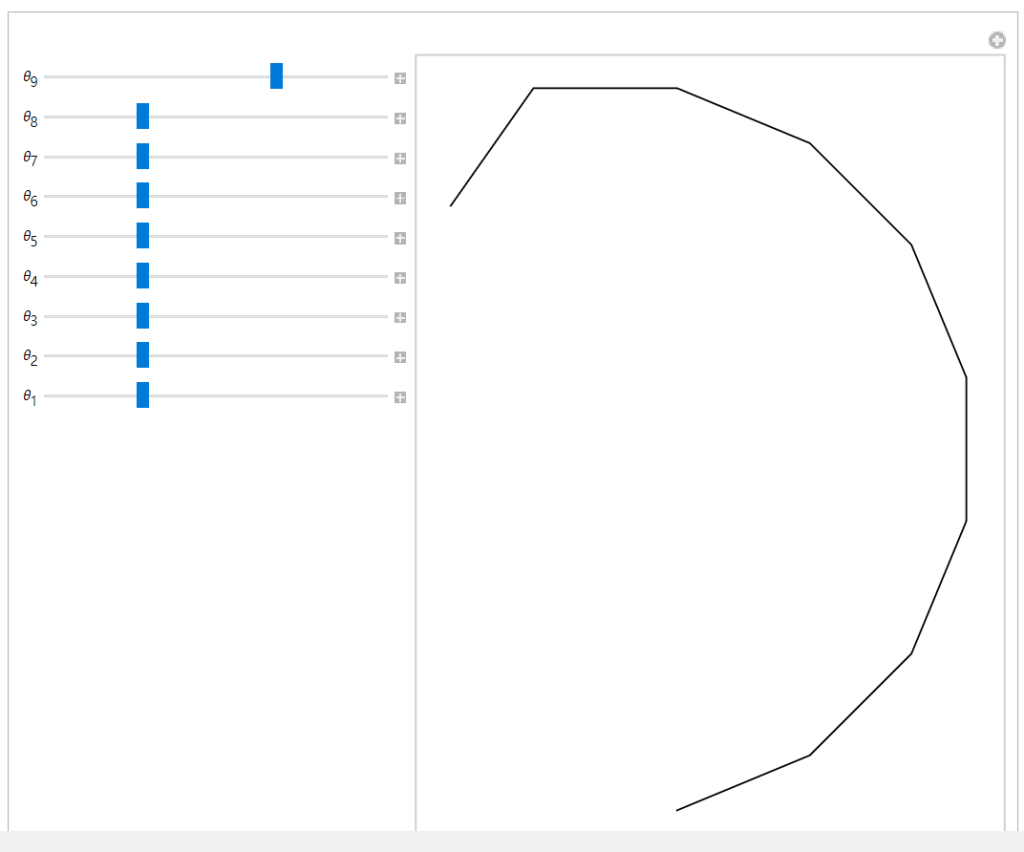
基本的弄懂之後,可以再做一些進階的控制,各位可以自由發運

參考資料
機器人建模和控制最最前面的內容
這個是前言裡的範例,用Wolfram入機器人的大門。
